TeleDex: Accessible Dexterous Teleoperation
Control any robot hand using your phone.
No external tracking or calibration. Dexterous, Reactive and Precise.
Despite increasing dataset scale and model capacity, robot manipulation policies still struggle to generalize beyond their training distributions. As a result, deploying state-of-the-art policies in new environments, tasks, or robot embodiments often requires collecting additional demonstrations. Enabling this in real-world deployment settings requires tools that allow users to collect demonstrations quickly, affordably, and with minimal setup. We present TeleDex, an open-source system for intuitive teleoperation of dexterous hands and robotic manipulators using any readily available phone. The system streams low-latency 6-DoF wrist poses and articulated 21-DoF hand state estimates from the phone, which are retargeted to robot arms and multi-fingered hands without requiring external tracking infrastructure. TeleDex supports both a handheld phone-only mode and an optional 3D-printable hand-mounted interface for finger-level teleoperation. By lowering the hardware and setup barriers to dexterous teleoperation, TeleDex enables users to quickly collect demonstrations during deployment to support policy fine-tuning. We evaluate the system across simulation and real-world manipulation tasks, demonstrating its effectiveness as a unified scalable interface for robot teleoperation. All software and hardware designs, along with demonstration videos, are open-sourced.
MolmoSpaces Support
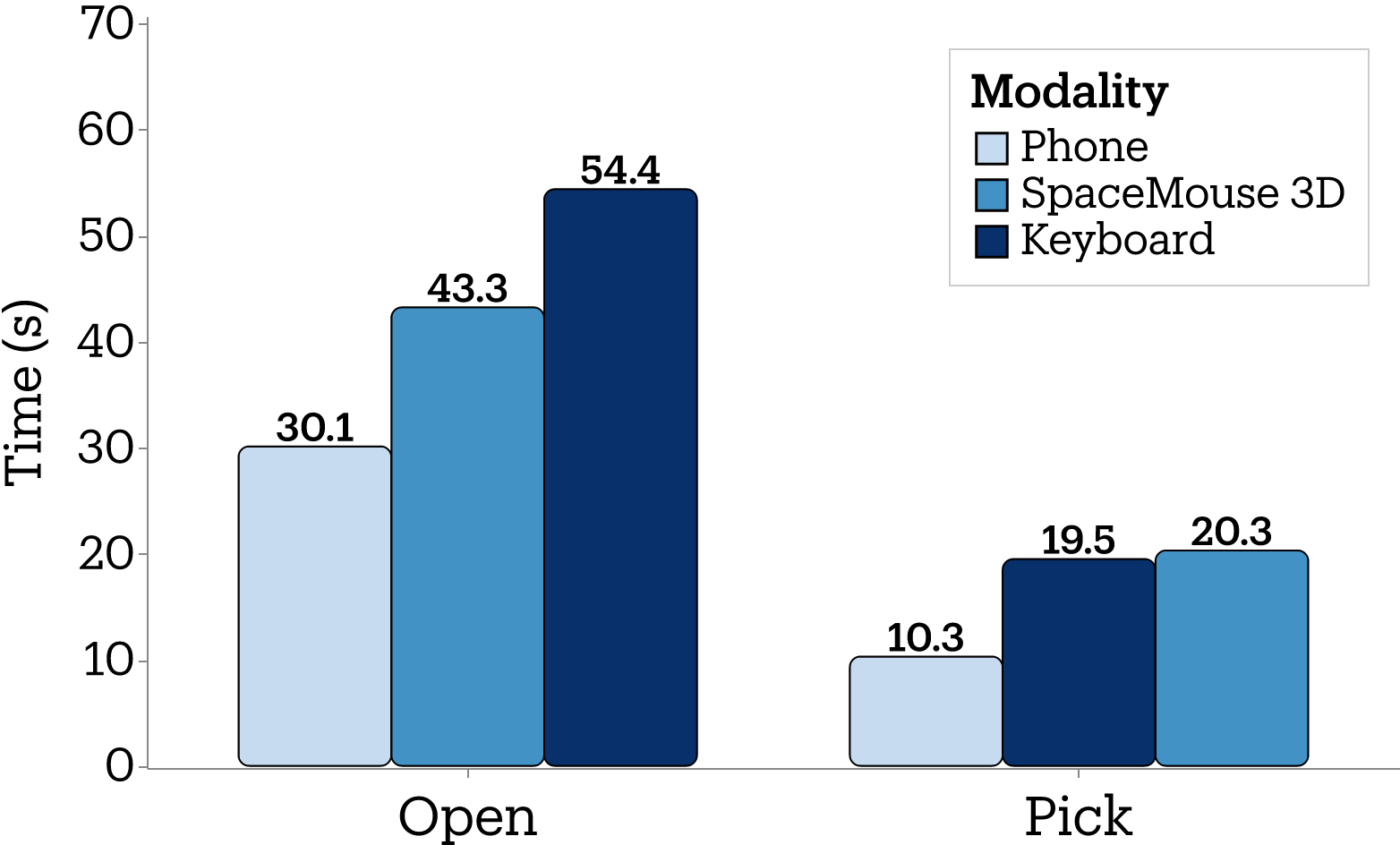
We integrate TeleDex into MolmoSpaces and run a user study comparing it to keyboard control and a 3Dconnexion SpaceMouse on the MS-Pick and MS-Open tasks. The bar plot shows the average time-to-success across five participants and 225 episodes. TeleDex enables faster demonstration collection than both baselines: while keyboard control is easy to learn, users struggle with rotations, and the SpaceMouse, though more intuitive for rotations, requires adaptation time and remains slower than the phone-based interface.
Native MuJoCo Support
TeleDex integrates natively with MuJoCo, mapping streamed phone poses directly to frames in arbitrary MJCF models. Below are example deployments across different robots and tasks in simulation.
Download
Download the TeleDex app from the App Store and install the Python package with pip install teledex. The source code, 3D-printable hardware files, and integration examples are available on GitHub.
BibTeX
@article{rayyan2026teledex,
title={Teledex: Accessible dexterous teleoperation},
author={Rayyan, Omar and Gilles, Maximilian and Cui, Yuchen},
journal={arXiv preprint arXiv:2603.17065},
year={2026}
}