|
IK Neural Network |
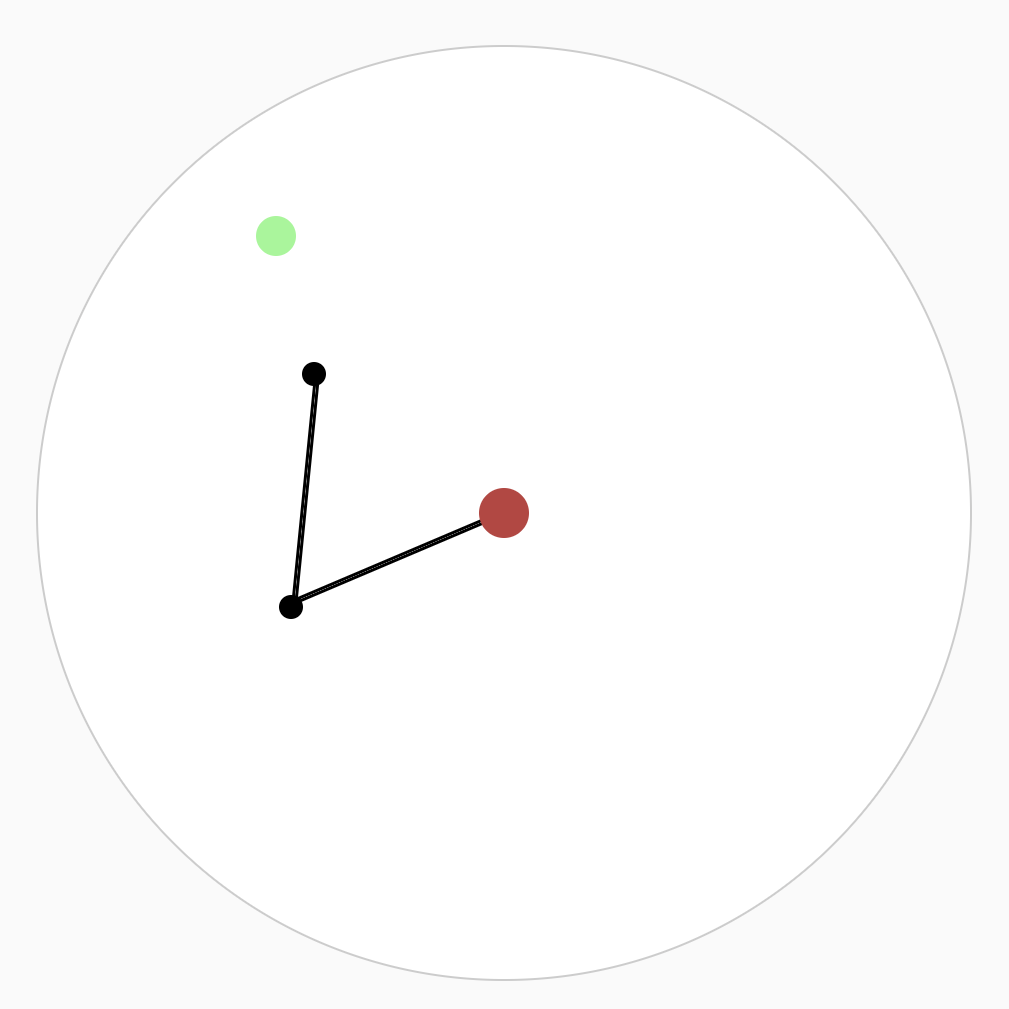
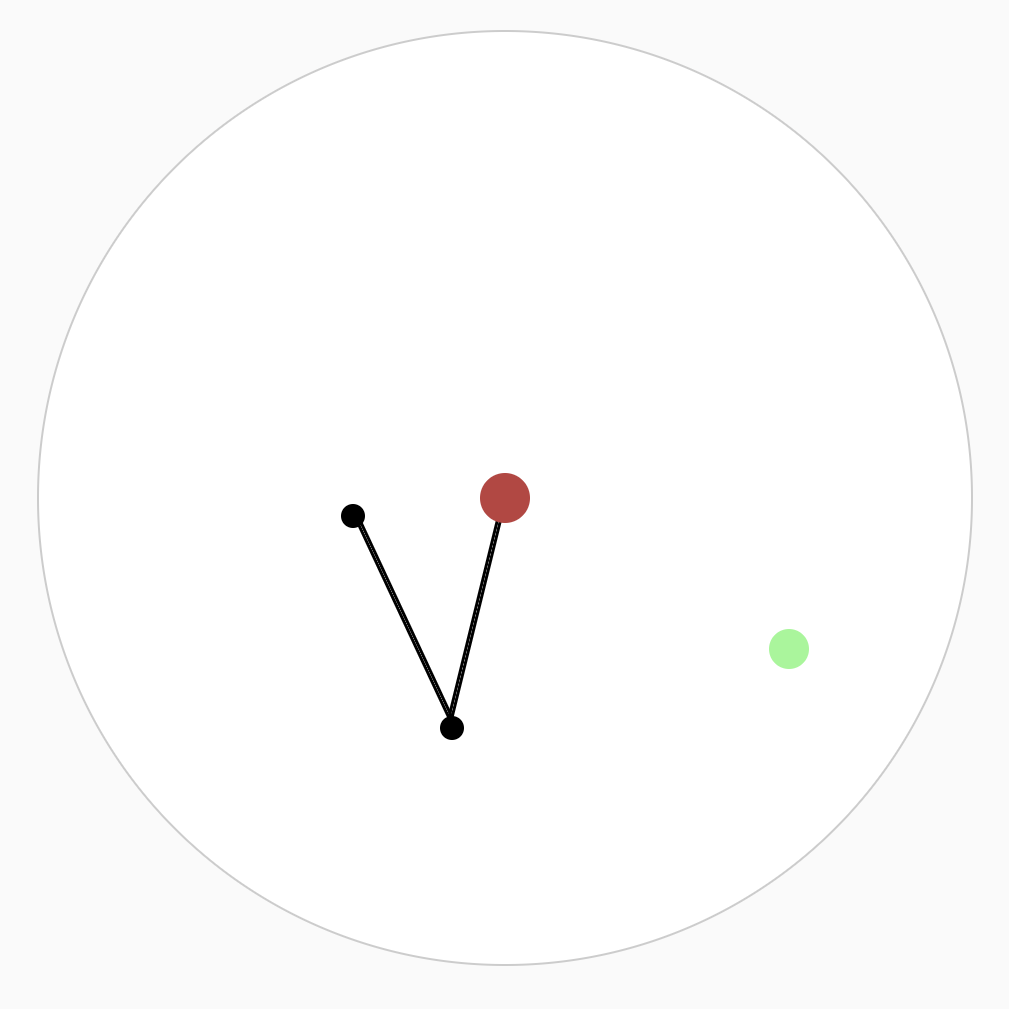
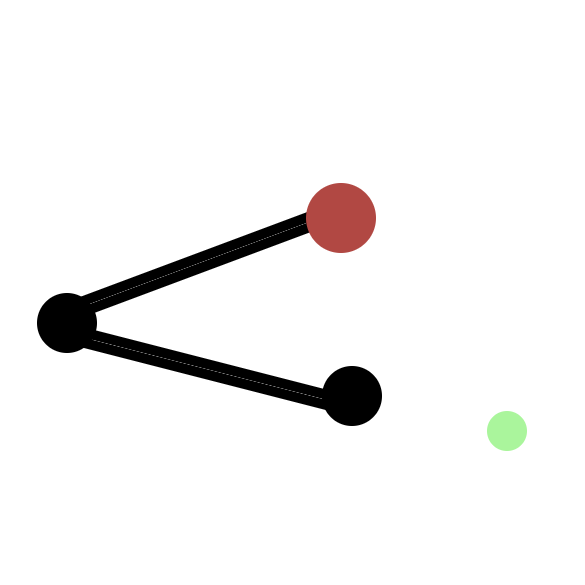
- Training a machine learning model to compute the inverse kinematics of a robot manipulator system alongside a live simulation.
- The model was trained using a dataset generated through forward kinematics simulations, capturing the relationships between end-effector positions and joint angles.
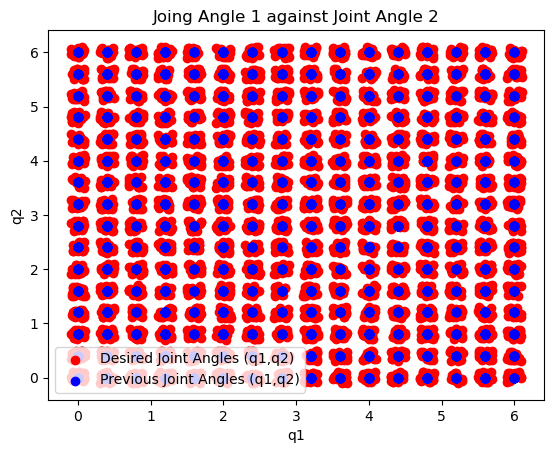
- For every variation of requried joint angles to reach the end-effector, I randomly generated 20 random angles +/- a maximum of 0.1 euclidean distance from the joint angles the can act as being current joint angles.
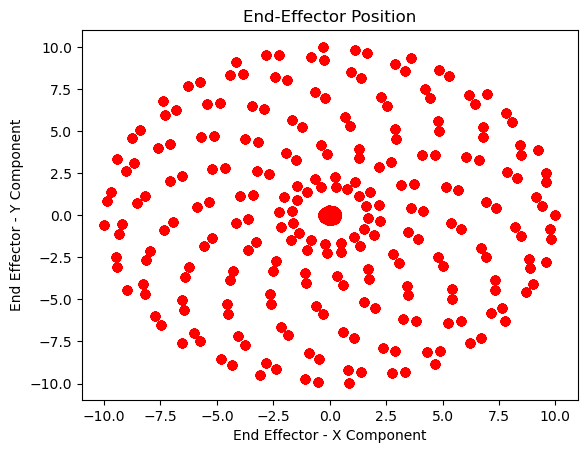
- The distributions of desired joint anglres, current joint angles, and end-effector positions in the generated data can be seen in the graphs below:
Screenshots: